Werte als Repräsentationen von zeitkontinuierlichen physikalischen Größen
Ein zeitkontinuierlicher Werttyp, insbesondere vom Typ float (das heißt, numerisch), wird in der Regel dazu verwendet, die Messung einer kontinuierlichen physikalischen Größe oder Eigenschaft durch einen Sensor darzustellen. Ein Wert kann zum Beispiel Folgendes darstellen:

Den Druck in einer Leitung.
Die mit einem Thermometer gemessene Temperatur.
Die Drehzahl einer Achse.
Die Position eines Objekts.
Dies sind alles kontinuierlich messbare Eigenschaften, die analoger Natur sind. Es wird einen gewissen Grad an Präzision geben in Bezug darauf, wie genau sie sowohl in Zeit als auch Wert gemessen werden können (und innerhalb physikalischer Grenzen). Mit zeitlicher Genauigkeit meinen wir, wie häufig eine Messung durchgeführt werden kann und wie präzise der Zeitpunkt der Messung erfasst wird. Es kann auch eine Latenz geben - eine Verzögerung zwischen einer Änderung der tatsächlichen Eigenschaft und wann sie gemessen werden kann. Mit Wertgenauigkeit meinen wir, mit welchem Präzisionsgrad der Wert gemessen werden kann - typischerweise können mindestens 2 signifikante Zahlen, und selten mehr als 4 oder 5 signifikante Zahlen der Genauigkeit, unterschieden werden kann. Mit kontinuierlich meinen wir, dass es gültig ist, die Eigenschaft zu einem beliebigen Zeitpunkt zu messen.
Wenn diskrete Messungen nicht kontinuierlich, sondern zu verschiedenen Zeitpunkten vorgenommen werden, kann man dies als
Abtastung (siehe auch
https://de.wikipedia.org/wiki/Abtastung_(Signalverarbeitung)) oder auch
Probe bezeichnen, und die Grenzen der Wertgenauigkeit werden als
Quantisierungsabweichungen bezeichnet (siehe auch
https://de.wikipedia.org/wiki/Quantisierung_(Signalverarbeitung)). Bei der Messung eines kontinuierlichen Wertes sollte die Rate, mit der die Messungen erzielt werden, keinen signifikanten Unterschied bei der Ausgabe eines Blocks oder eines Modells aufweisen. Mehr Messungen können zu einer genaueren Ausgabe führen, sie sollten aber keine grobe Änderung der Berechnungen vornehmen.
Beispiel: ein Sensor, der die Drehzahl einer Achse misst, kann jede Zehntelsekunde (0,1) einen neuen Messwert liefern und im Bereich von 0 bis 10000 U/min nur bis zu den nächsten 50 U/min messen. Eine Änderung von 10 oder 20 U/min führt möglicherweise nicht zu einer Änderung des Messwerts, da die Änderung geringer ist als der Genauigkeitsgrad. Das Anziehen von Bremsen zum Anhalten einer rotierenden Achse wird möglicherweise nicht sofort erkannt und führt zunächst zu einem Messwert von 1000 U/min, dem 0,1 Sekunden später nach dem Anhalten der Achse ein Messwert von 0 U/min folgt (wobei die Achse einige Millisekunden zum Anhalten braucht und sich in diesem Zeitraum verlangsamt).
Ein Sensor kann so angeschlossen werden, dass er eine neue Messung mit einer regelmäßigen Frequenz liefert (zum Beispiel, Audio-Sampling mit 8.000 Hz oder eine Kamera, die Videos mit 50 Bildern pro Sekunde aufnimmt). Dies ist eine regelmäßige Abtasteingabe (oder auch Probeeingabe genannt).
Eine einfache und übliche Optimierung besteht darin, dass ein Sensor oder ein Gerät nur dann einen neuen Messwert generieren darf, wenn sich der Wert vom vorherigen Wert unterscheidet. Für viele Sensoren wäre es normal, etwas zu messen, das einen stetigen oder konstanten Wert häufig beibehält (zumindest innerhalb der Quantisierungsgrenze), und es hat keinen Mehrwert, immer wieder denselben Wert zu senden. Dies ist eine Änderungseingabe. Die zugrundeliegende Abtastfrequenz bleibt bestehen, aber neue Werte werden nur dann vom Sensor übertragen, wenn sie unterschiedlich sind.
Es ist auch möglich, die regulären Formen für die Probeeingabe und die Änderungseingabe miteinander zu kombinieren: ein Sensor, der eine neue Eingabe erzeugt, wenn sich der Messwert ändert, oder periodisch. Dies ist eine hybride Eingabe. Beispiel: der oben beschriebene Drehsensor kann nur dann einen Wert senden, wenn sich die Drehzahl ändert, oder unabhängig davon alle 10 Sekunden.
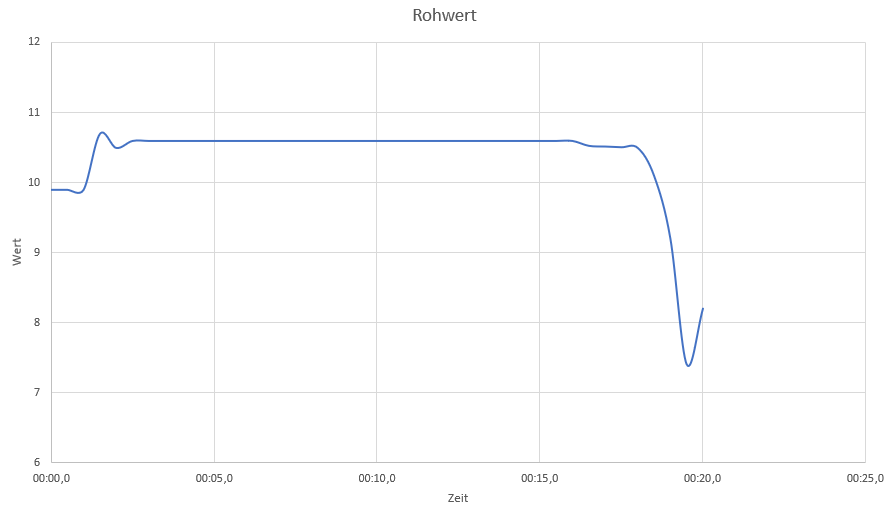
Betrachten Sie als Beispiel einen Rohwert, der sich im Laufe der Zeit wie folgt ändert:
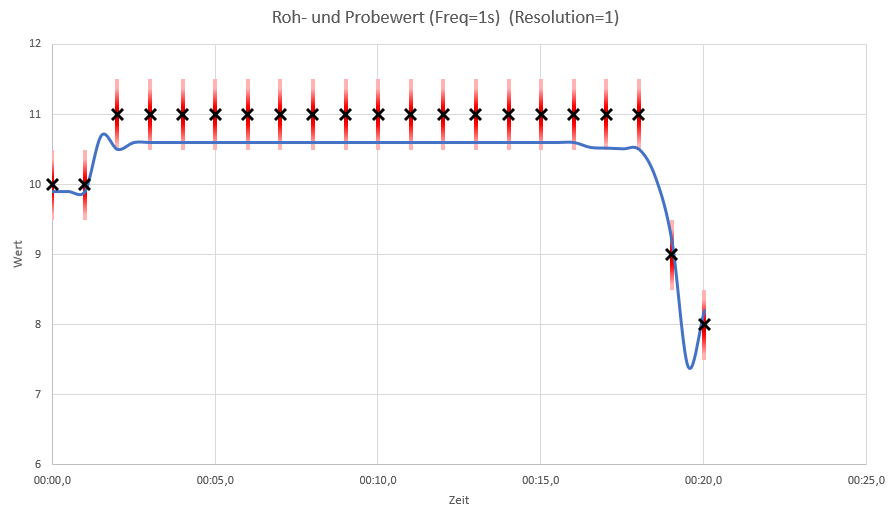
Aber angenommen, der Sensor kann nur bis zur nächsten ganzen Zahl messen, und nur einmal pro Sekunde. Der Wert hat also einen gewissen Fehler, was durch die roten Fehlerbalken angezeigt wird:
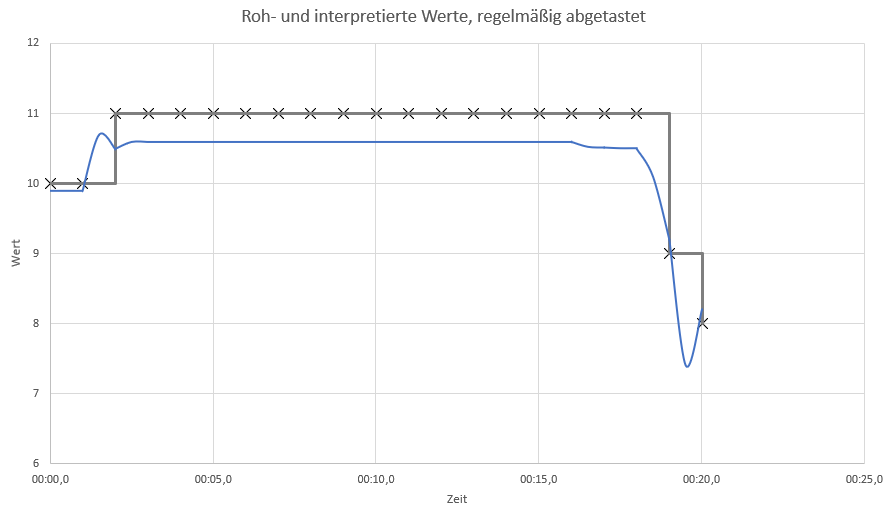
Ein regelmäßiger Abtastsensor würde einheitliche Eingaben generieren:
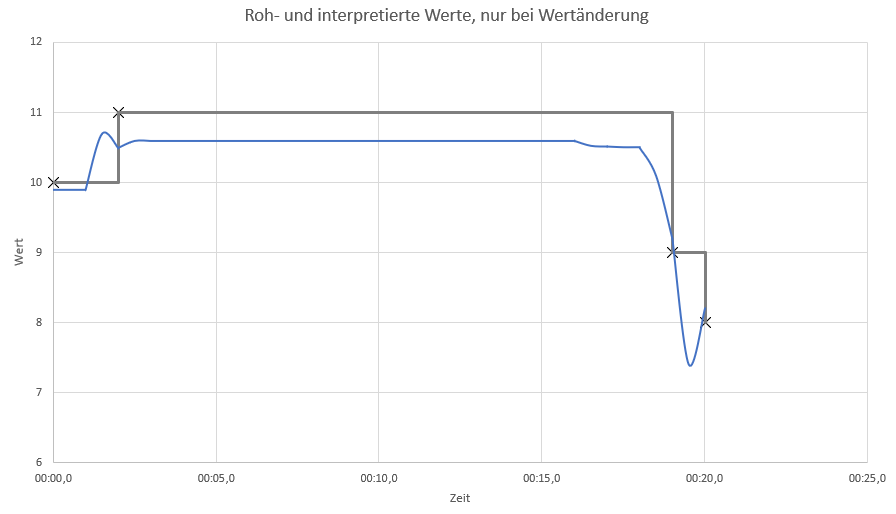
Während ein Änderungssensor nur dann Eingaben generiert, wenn sich ein Wert ändert:
Die graue Linie zeigt, wie ein Echtzeit-Verarbeitungssystem wie Apama solche Werte interpretiert. Es wird davon ausgegangen, dass ein Wert den letzten Wert beibehält, bis er durch einen neueren Wert ersetzt wird. Es ist auch üblich, Linien zwischen den Messungen zu zeichnen. So gibt es eine gerade Linie, die sich von Wert 11 um 00:01 Uhr auf den Wert 9 um 00:19 Uhr verringert. Ein Echtzeitsystem kann dies jedoch nicht tun. Es kann nicht wissen, was der nächste Wert sein wird, wobei die Betrachtung historischer Daten zwischen den Werten interpolieren kann. Zur Zeit 00:19,5 hat es nur die Information, dass der Wert 11 und dann 9 war. Es weiß noch nicht, dass der Wert zur Zeit 00:20 dann 8 sein wird. Beachten Sie, dass es keinen Unterschied zwischen der interpretierten grauen Linie im Fall einer regelmäßigen Abtastung und im Änderungsfall gibt. Beachten Sie, dass in der Mitte des Diagramms eine erheblicher Quantisierungsabweichung vorliegt (der true-Wert von 10,6 wird als 11 gelesen), und die Abtasthäufigkeit von nur einmal pro Sekunde bedeutet, dass der Mindestpunkt von 7,4 bei 00:19,5 Sekunden verloren geht.